교육
교육 목록
- 라두이노 미니 소개
- 라두이노 미니 조립
- 라두이노 미니 조종
- 라두이노 미니 개발환경
- RGB
- SOUND
- RGB + SOUND
- DOT MATRIX LED
- 6축 관성센서 + processing
- SBUS + processing 시뮬레이션
- SBUS 비행제어
- BLE 비행제어
- 적외선 고도제어
- 초음파 고도제어
- 카메라 응용
라두이노 미니 조종
2018-09-20드론에서 Roll, Pitch, Yaw는 중요한 요소이기 때문에, 이 세가지 조건에 대하여 잘 알지 못한다면 드론을 제대로 띄우기 어렵습니다. 비행체의 경우 Roll, Pitch, Yaw가 매우 유용합니다. 드론의 경우 비행기와 같습니다.
상하타 ( Throttle, 스로틀 ) : 스틱을 앞뒤로 밀어 드론을 위로 띄우거나 아래로 내린다.
전후타 ( Pitch, 피치 ) : 스틱을 앞으로 밀면 전진하고 뒤로 당기면, 뒤로 후진합니다. → 전후 기울어짐의 정도
회전타 ( Yaw, 요우 ) : 스틱을 좌우로 움직이면 제자리에서 반시계 또는 시계방향으로 돕니다. → 수평 회전 정도
좌우타 ( Roll, 롤 ) : 스틱을 좌우로 움직이면 드론이 좌측이나 우측방향으로 기울면서 그 방향으로 나아갑니다. → 좌우 기울어짐의 정도

드론의 전방을 기준으로 좌우 기울어짐을 Roll, 전후 기울어짐을 Pitch, 수평 회전 정도를 Yaw라고 합니다.
※ 1단계 : 페어링 (pairing)
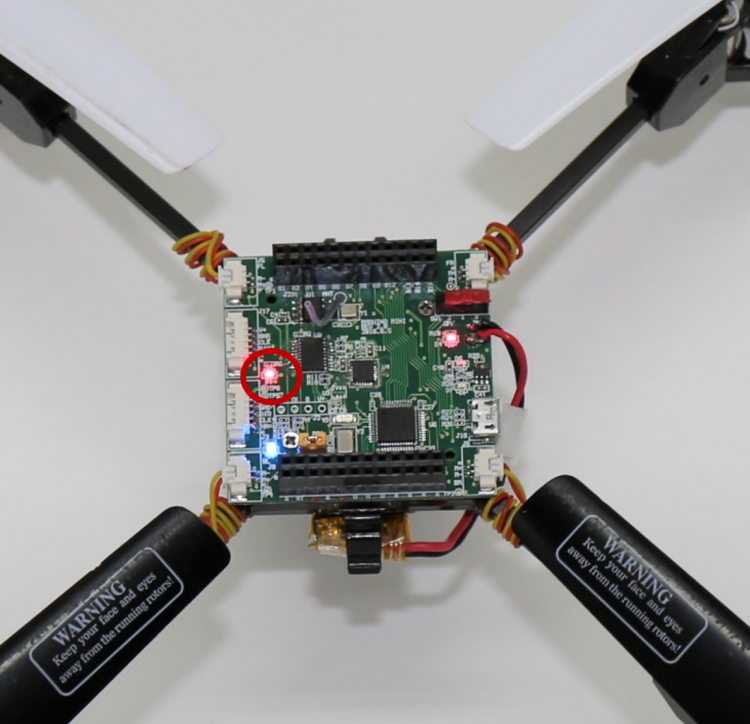
라두이노 미니의 최초 전원을 켜면, 빨간 원 안의 LED가 매우 빠르게 깜박거립니다. 이때, 조종기의 전원을 켜서 페어링이 완료가 된 후에는 라두이노 미니의 LED의 빨간불이 지속적으로 켜집니다.
※ 2단계 : 센서 보정 (Calibration)
드론 내 관성센서의 X,Y,Z 축을 재 조정하는 작업입니다, 만약 캘리브레이션을 하지 않으면 드론이 정상적으로 작동 하지 않을 수 있습니다. 그렇기 때문에, 처음 사용 전 반드시 캘리브레이션 하는 것을 필요합니다.
캘리브레이션 방법은 평평한 바닥면에 드론을 잘 놓고 조정기와 드론이 페어링 된 상태에서 조종기의 Pitch를 아래(↓ ↓ ↓ )로 빠르게 세번 내리면, 빨간 원 안의 LED가 5번 점멸한후 켜지면 캘리브레이션이 완료 됩니다.
※ LOW Battery 가 되었을 경우
비행 중 빨간 원 안의 LED가 1초 간격으로 점멸 후, 자동으로 착륙합니다.